![]()
AABB:intersect 函数使用什么坐标系进行求交判断呢。
我的理解是使用世界坐标系,但函数头缺少把 AABB 转换到世界坐标系所需的 model 矩阵,请问该怎么解决呢
AABB:intersect 函数头及其定义:
bool AABB::intersect(const Ray& ray, const Vector3f& inv_dir, const std::array<int, 3>& dir_is_neg)
![]()
AABB:intersect 函数使用什么坐标系进行求交判断呢。
我的理解是使用世界坐标系,但函数头缺少把 AABB 转换到世界坐标系所需的 model 矩阵,请问该怎么解决呢
AABB:intersect 函数头及其定义:
bool AABB::intersect(const Ray& ray, const Vector3f& inv_dir, const std::array<int, 3>& dir_is_neg)
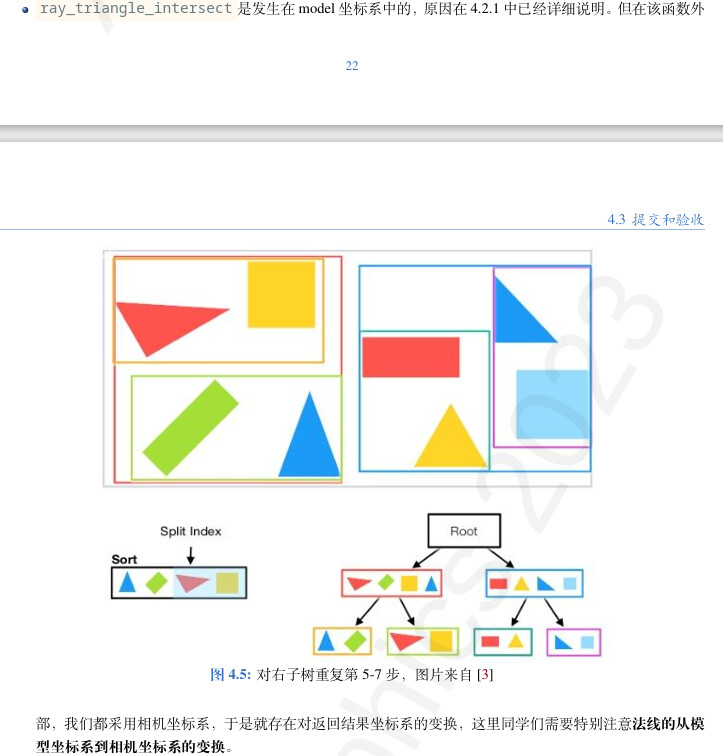
ray_triangle_intersect 是发生在 model 坐标系中的,原因在 4.2.1 中已经详细说明。但在该函数外部,我们都采用相机坐标系,于是就存在对返回结果坐标系的变换,这里同学们需要特别注意法线的从模型坐标系到相机坐标系的变换。
这一段是在讲 ray_triangle_intersect 的处理,也就是说这一步返回的结果就需要转化为世界坐标系,而 AABB::intersect 应该不需要考虑这个问题。